Research on Glass Knifefish Tracking Behavior
February 2021 - Present
Locomotion in Mechanical and Biological Systems Laboratory (LIMBS Lab), JHU
Research Topic:
Responsibilities:
Skills Applied:
Comments:
I am fascinated by the intricate movement mechanics of Glass Knifefish and learned a lot of technical skills on signal processing and programming along the way.
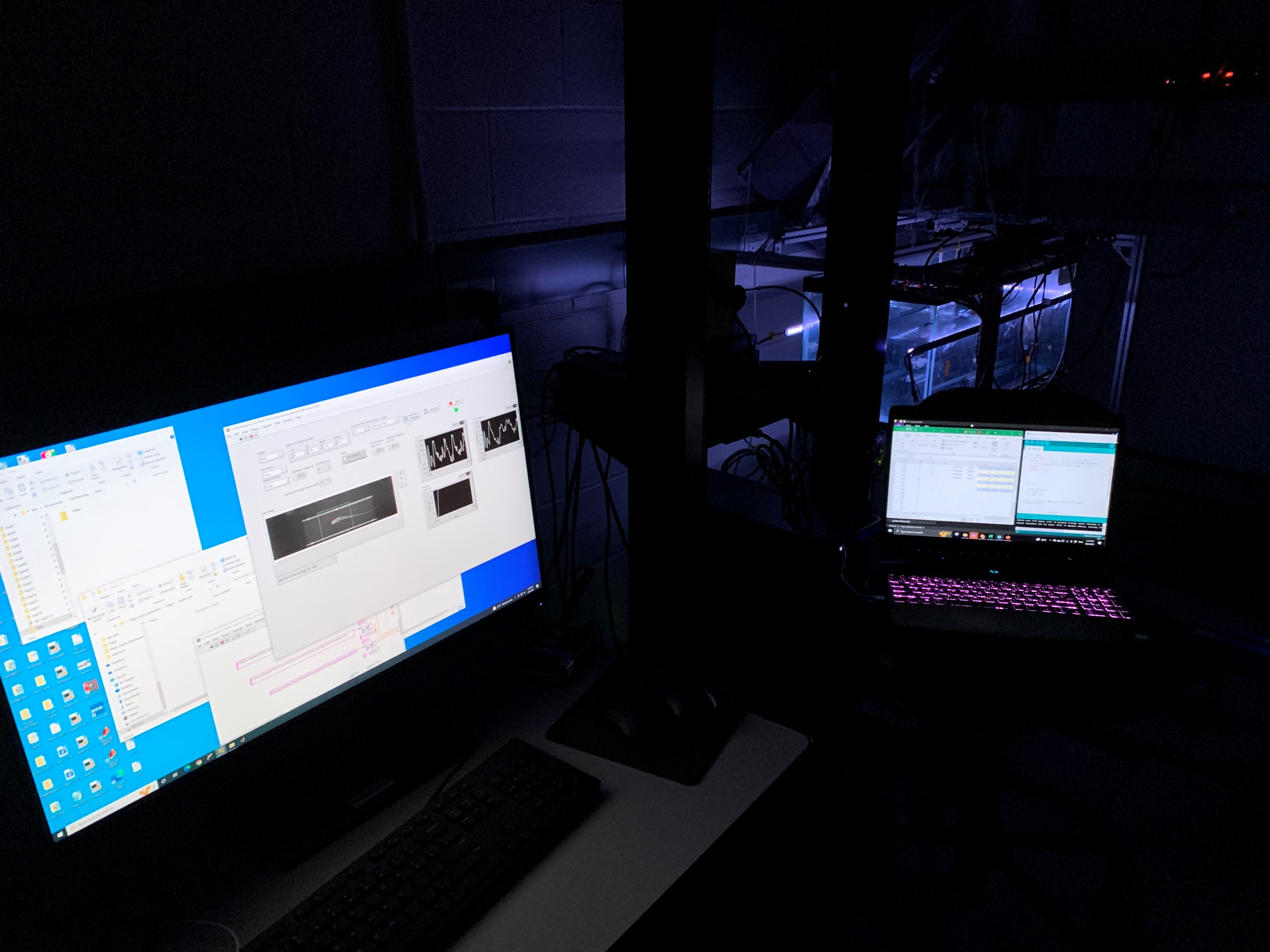
Experiment set-up for luminance-dependence trials.
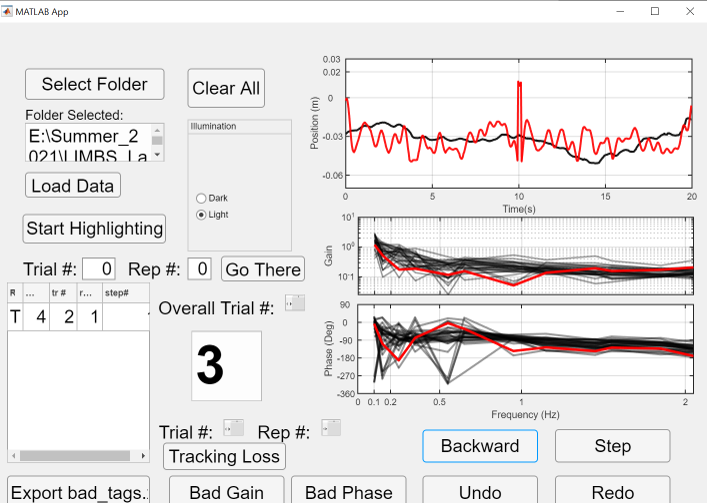
Custom GUI interface for easy navigation between trials and Bode Plot visualization.
CV-tracked points along the body.
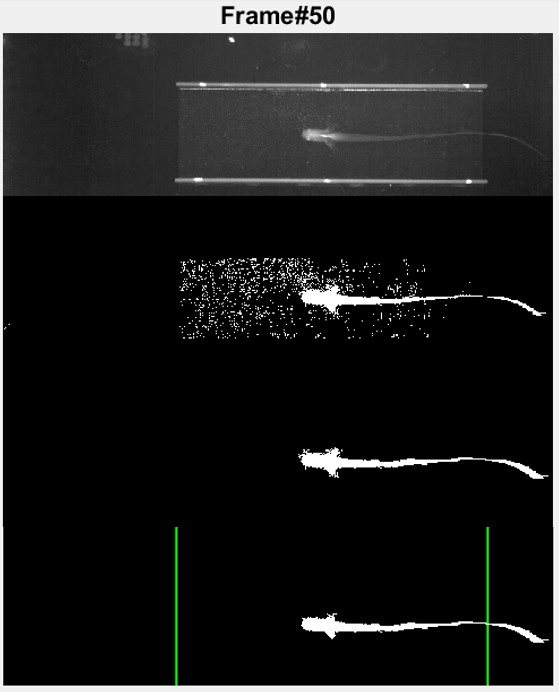
MATLAB algorithm to extract the fish body and convert into binary frames.